Ulticast Process Uses 3D Printer to Cast Silicone for Soft Robotics

Students from Delft University of Technology have modified a 3D printer to cast silicone for soft robotics in a process they call Ulticast.
3D printing silicone with a regular FDM printer was considered impossible. That’s subject to change. Students from Delft University of Technology made a breakthrough in 3D printing silicone.
Their process, called “Ulticast”, blends 3D printing with traditional casting methods. First, they 3D print a plastic mold, then fill the mold with a two-component silicone mix (see video below). For that, the team used a modified Ultimaker 2+ (review here).
The implications of this could be big for robotics, meaning a leap forward for the DIY and experimental medical sector. Coordinator Jouke Verlinden said: “3D printing offers a variety of applications, soft robotics being one of them. It allows you to make things that are impossible with traditional robotics.”
Ulticast Could Speed Up Soft Robotics Developments
The Delft team (Christoffer Berndtsen, Luc van den Boogaart, Max Nobel, Olivier Groot et al) exhibited their work at the Advanced Prototyping Science Fair at the Industrial Design Engineering Faculty.
They showed how to blend 3D printing and traditional methods of casting. The process works by firstly designing a 3D geometry which has a predefined internal cavity. The 3D design is then uploaded to a slicer tool. Interruptions for printing process have to be defined at set heights.
The Ultimaker 2+ first prints the mold with water soluble Poly Vinyl Alcohol (PVA). After that, an extra mounted extruder filled the mold with a two-component silicone mix.
Next, the nozzle is primed at a set location and retracts the silicone so it doesn’t spill when moving to the printed PVA mold. The mold is filled with a calculated amount of silicone; then the nozzle retreats to allow the PVA mold to be built further.
In the end, you drop the print in the water until only the silicone remains.
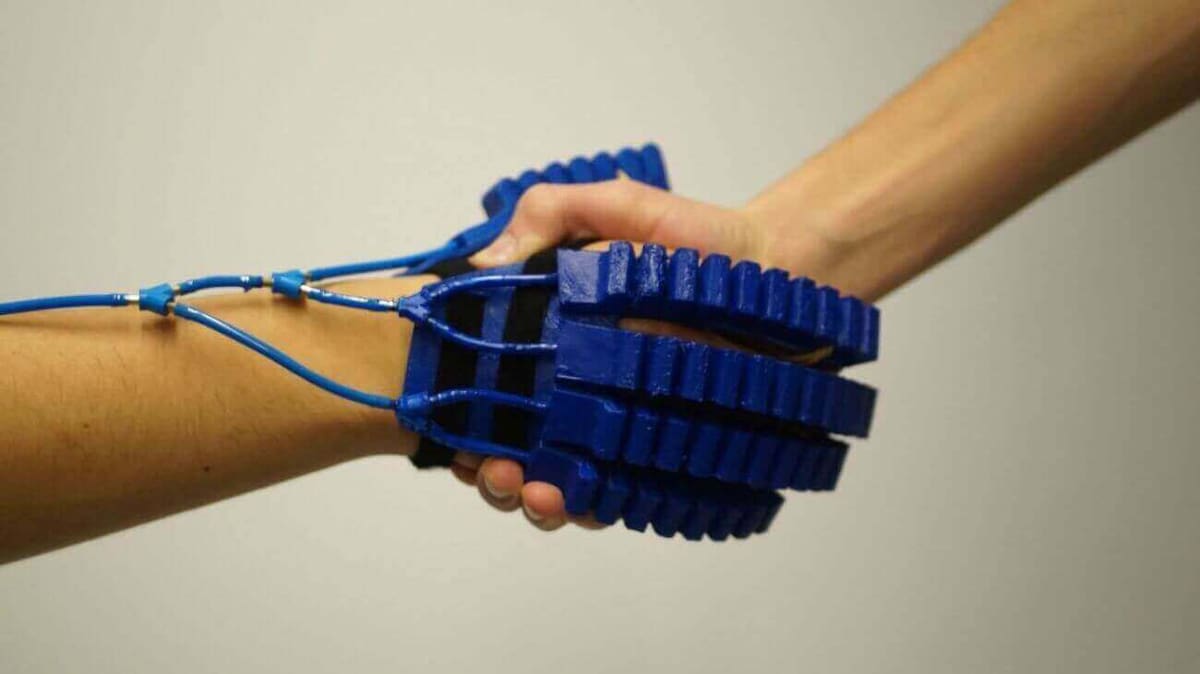
So far, the team have managed to print a hard skeleton inside soft silicone. Ulticasting can make printing a soft actuator much simpler and faster, making the process cheaper. It also allows for a lot of design freedom. Rob Scharff, also a member of the Ulticast team, adds: “You get a lot of freedom to personalize the behavior of robots with geometry and materials.”
Low-cost development of soft robotic orthotics and grippers which have been personalized are made possible with Ulticast. Blending both rigid and soft components could have a bigger impact on the medical world that we realize.
Want to find out more about the Ulticast process? Visit SoftRobotics2016 for more information about the process as it was taking place.
Source: Ultimaker

License: The text of "Ulticast Process Uses 3D Printer to Cast Silicone for Soft Robotics" by All3DP is licensed under a Creative Commons Attribution 4.0 International License.