Soft Robotics Hand Improves Robot-Human Interactions

Ever wondered how we can improve robot-human interactions (HRI)? One Dutch graduate is on a mission to do just this through the use of more tactile materials: Rob Scharff graduated from Delft University of Technology in April 2015. During his graduation, he developed a 3D printed soft robotic hand that can shake hands with people.
Scharff told the architectural and design magazine Dezeen: “Robots are becoming omnipresent in our lives. This makes it very interesting and important to think about robotics from a design perspective. Currently, most robots are relatively rigid machines which make unnatural movements. Soft robotics – the application of soft materials in robotics – provides a different perspective to interacting with robots.”
Currently, Rob works as a researcher, focusing on the application of soft materials in robotics to improve human robot interaction. Within this field, he mainly focuses on pneumatic 3D printed robots with grasping functionalities. The goal of his research is to implement soft robotic technologies in orthotics, prosthetics, care robots, exploratory robots and (industrial) grippers.
How does the soft robotics hand work?
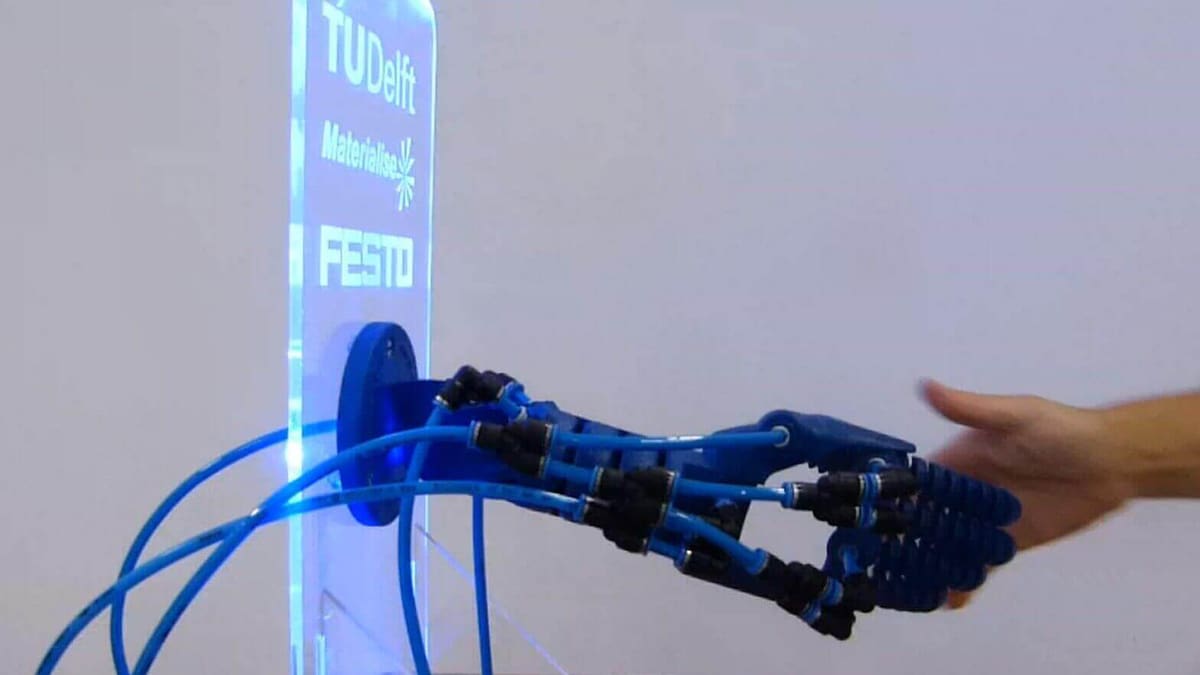
Scharff’s project explores the possibilities of 3D printing bellow-shaped air chambers in a flexible material to be used as actuators or sensors. These air chambers respond to the pressure applied by a human hand.
The way this works is, if you squeeze the robotic limb, an increase in air pressure in the chambers causes the fingers to grip more or less, all depending on how firm the original handshake was.
In order to develop this technology Scharff referenced natural biological systems to design the hand, including human muscles and the structure of an elephant’s trunk. The fingers andthe thumb of the hand can also be controlled separately using pneumatics, and the wrist can rotate in both directions.
Scharff said: “A hand-shaking robot that ‘feels’ how hard you squeeze its hand and squeezes back accordingly was created as a metaphor for how this technology may improve HRI. The new interactions that are enabled by the technology can be used to enhance orthotics, prosthetics, care robots and exploratory robots.”
In order to print the soft robotics hand, Scharff chose to use selective laser sintering (SLS) as this technology allowed the hand to be printed in a single piece. The material used was similar to polyurethane, which is a highly flexible material.
Although currently still a prototype, Scharff is continuing to develop the technology for use in 3D-printed custom-fit gloves, which could help people learn to grip objects again. The soft robotics hand was on show as part of the Mind The Step exhibition in Eindhoven’s Klokgebouw building for Dutch Design Week 2015 in October.
License: The text of "Soft Robotics Hand Improves Robot-Human Interactions" by All3DP is licensed under a Creative Commons Attribution 4.0 International License.