These 3D Printed Micro-Bristle-Bots Move by Harnessing Vibrations

Researchers from the Georgia Institute of Technology have developed a 3D printed robot that is almost too small to see. It moves by harnessing vibrations and could provide a pathway to intravenous surgeries, disaster relief, and early warning systems for seismic activity.
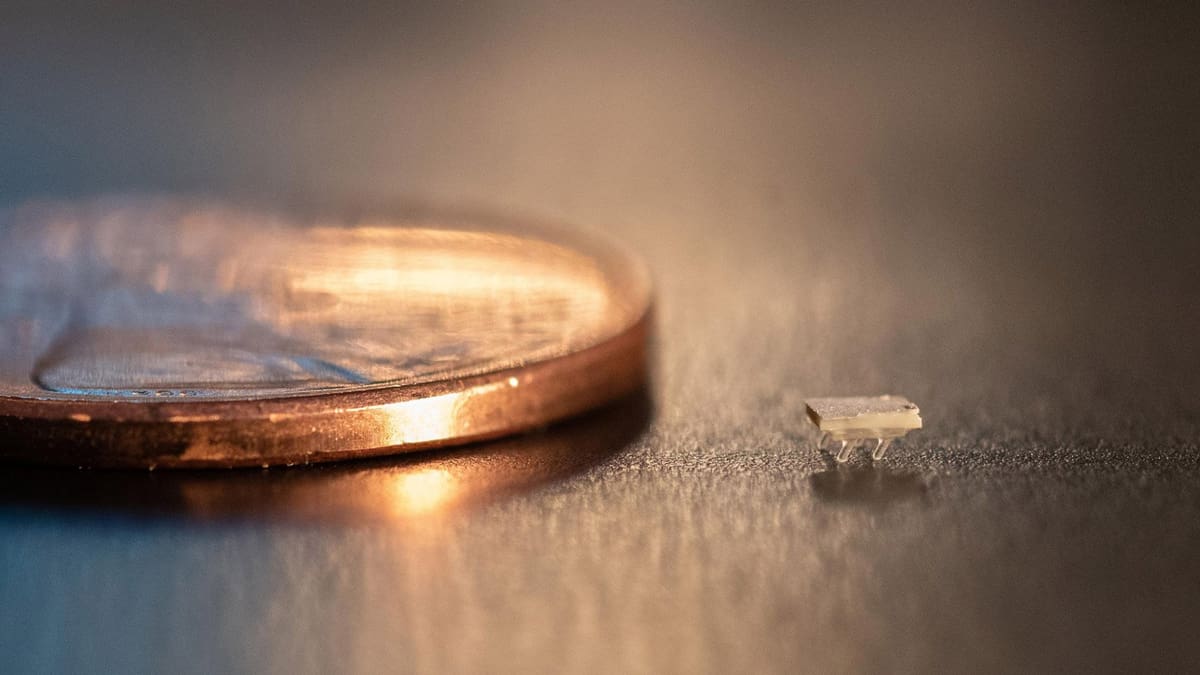
The micro-bristle-bot is a new creation of researchers at the Georgia Institute of Technology. This tiny robot is 3D printed and moves by harnessing vibrations from speakers, ultrasound sources, and piezoelectric actuators.
“We are working to make the technology robust, and we have a lot of potential applications in mind… We are working at the intersection of mechanics, electronics, biology, and physics. It’s a very rich area, and there’s a lot of room for multidisciplinary concepts,” explains Azadeh Ansari, assistant professor in the School of Electrical and Computer Engineering.
These 3D printed robots weigh about five milligrams and are just two millimeters long — purportedly the size of the world’s smallest ant. Unlike ants, the researchers believe that swarms of similar robots could one day be used to repair injuries inside the human body.
Robots can be controlled individually depending on their configurations, and researchers can use different vibration frequencies to get a response. Even though the bots are minuscule, in just one second they can cover four times their own length.
Micro-Bristle-Bots Have Four to Six Legs
The micro-bristle-bots have 3D printed polymer bodies that are created using two-photon polymerization lithography (TPP). This printed body, which typically has between four and six legs, is glued to a piezoelectric actuator which generates the vibrations using an external power supply.
Given the bot’s small size, a battery is a no-go for the moment. The system can also pick up vibrations externally from sources such as acoustic speakers, ultrasound, and piezoelectric speakers.
Vibrations move the bots’ legs up and down, driving them forward. The amplitude of the vibrations controls the bot’s speed. Now, Ansari and her team are developing a steering capability to the bots. She explains: “Once you have a fully steerable micro-robot, you can imagine doing a lot of interesting things.”
After this has been achieved, they will begin working on 3D printing micro-bots that can swim and jump. For now, the researchers are testing the bots in a “playground” in the lab.
“We can look at the collective behavior of ants, for example, and apply what we learn from them to our little robots… These micro-bristle-bots walk nicely in a laboratory environment, but there is a lot more we will have to do before they can go out into the outside world,” said Ansari.
If you’re interested in learning more, the researcher’s paper is to be published in the Journal of Micromechanics and Microengineering.
Source: Georgia Tech

License: The text of "These 3D Printed Micro-Bristle-Bots Move by Harnessing Vibrations" by All3DP is licensed under a Creative Commons Attribution 4.0 International License.