RoboCup 2015 in China with 3D Printed Humanoid Robots

Welcome to RoboCup. By 2150, a team of humanoid robot soccer players will win a soccer game against the winner of the most recent World Cup.

We’re reporting *almost* live from the pitch of RoboCup 2015 in China, which officially kicks off on Friday 17 July. A unique contest where artificial intelligence and advanced robotics are applied to “the beautiful game”, competing teams from around the world have gathered in their metaphorical changing rooms and are making final preparations.
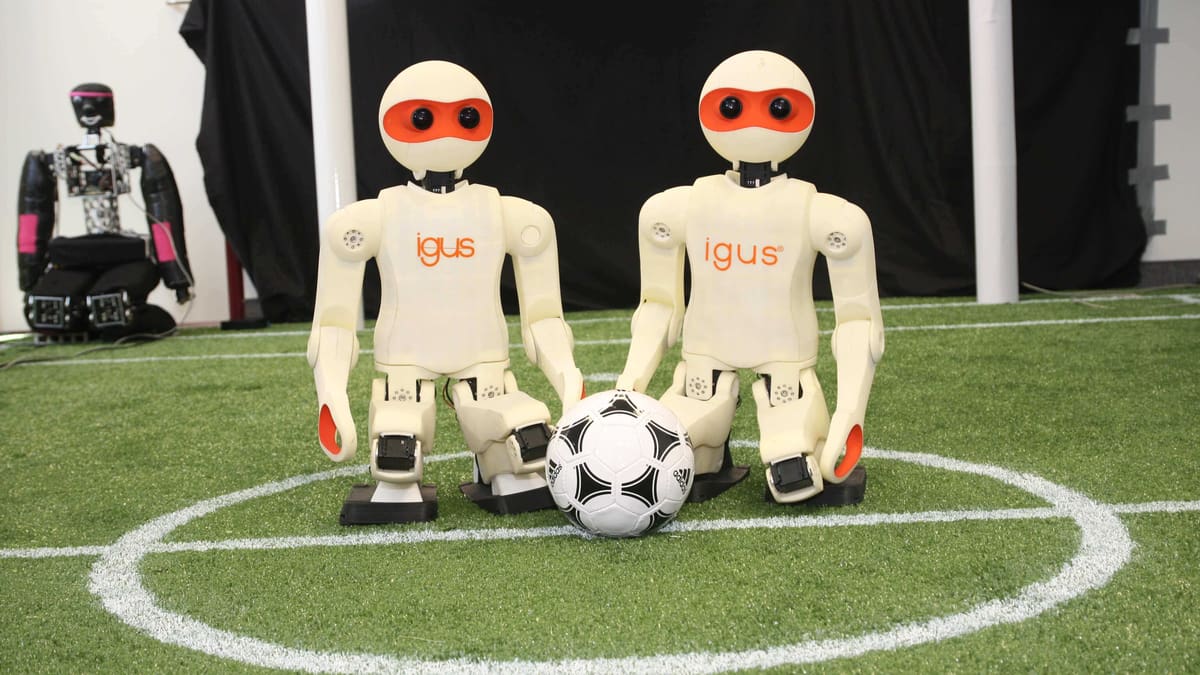
Prior to the tournament, ALL3DP met with a contingent from the University of Bonn to learn about their 3D printed humanoid robots. They have developed a brand new type of player called the igus Humanoid Open Platform. These impressive creatures stand 90 centimetres tall and are 6,6 kg heavy, with 3D printed outer shells made from ABSplus.
It’s the first appearance of the igus Humanoid in an official RoboCup tournament, but team leader Philipp Allgeuer, an Australian doctoral student at the University of Bonn, is confident about their chances. German teams are world-renowned from former RoboCup tournaments, where they have been on a winning streak in the teen-size humanoid league for five consecutive years (a legendary run that only just came to an end in 2014). Allgeuer is leading a group of seven specialists representing Bonn at RoboCup 2015.
Professor Sven Behnke is Head of Computer Science Department VI and Head of Autonomous Intelligent Systems Group at the Rheinische Friedrich-Wilhelms-University of Bonn. Behnke’s team has been working on humanoid robots for many years now, and they have participated in RoboCup since the very beginning, where the first tournament took place in Japan in 1997. In the Cup’s early days, robots still rolled around on wheels. Since 2002, there have been participants with legs.
Asked why people would want to build artificially intelligent soccer players, Prof. Behnke takes us on a whirlwind history tour. In the 1950s, “artificial intelligence” came into being. Computers were devised that could play chess against humans, but when they began to win these matches, scientists sought new challenges. Developing humanoid robots to play soccer is the logical progression. The fact is, it’s incredibly difficult to recognize our environment through purely technical means. Even more so is the programming of coordinated teamwork or body movement between multiple AI units.
igus Humanoid a RoboCup Contender?
The igus Humanoid is an open platform. It measures 90 cm in height, and has 20 small motors driving its joints. One camera is responsible for checking the surroundings in a maximum 180 degree angle. “Different to a human body, our robot has its brain in the back,” Prof. Behnke explains.
At the heart of the robot’s design is a CM730 sub controller board, which contains power management features, management of a Dynamixel bus, and a Cortex M3 STM32F103RE microcontroller running at 72 MHz, alongside numerous other peripheral features. The CM730 is connected to a PC via USB running a full 64-bit Ubuntu Linux operating system. All of the robot control software and processing runs on this Intel i7-4500U PC. The purpose of the CM730 is to interface the PC with the remainder of the electronics in the robot.
All of this technical equipment fits into a body made of plastic. During our visit to the Robotics Lab at Bonn University, we met Michael Schreiber. The tall mechanical engineer stands in a room full of parts. He is responsible for the assembly of the platform.
“We get all our plastic parts 3D printed by igus,” he says. “They are using an SLS printer, which we cannot afford!”
The Humanoid Open Platform is collaboration between researchers at the University of Bonn and igus – a leading manufacturer of injection moulded plastic machine parts and energy transmission systems, paid for with a standard German Research Foundation (DFG) grant.

The body was designed in collaboration between igus and Prof. Behnke’s team. “Fitting in all the wires is one of the most time-consuming tasks,” Schreiber explains. Normally it takes him weeks to finish one player, but as the team is getting ready to leave for the RoboCup, he has less than a week left to get them all ready.
The choice of almost exclusively using 3D printed plastic parts for the mechanical components of the robot has greatly simplified the manufacturing of the robots. Team leader Allgeuer adds: “The great thing about 3D printed bodies is that we can change or modify component parts very easily.”
For participants counting down the minutes to the first whistle of the opening game, there is additional pressure thanks to a new set of regulations that have made the games more difficult than previous years. Instead of having multiple colors (to aid recognition and orientation), the goals are now a plain shade of white. For the same reason, the ball is now a standard black and white instead.
And as a major challenge for all teams, the players now have to compete on artificial grass instead of hard carpet. “The players are so light that they’re in danger of sinking into the ground”, Prof. Behnke said. “We had to enlarge the feet and add four spikes under their soles.”
But inevitably, the time for preparations are over. With a raft of new innovations and regulations coming into play, RoboCup 2015 promises to be the most exciting tournament yet. May the best robot win.
License: The text of "RoboCup 2015 in China with 3D Printed Humanoid Robots" by All3DP is licensed under a Creative Commons Attribution 4.0 International License.