
TacTip Wins Harvard International Soft Robotics Competition

TacTip is an open-source 3D printed artificial fingertip that can ‘feel’, and has won the Harvard international Soft Robotics competition.
A world with “feeling” robots may sound like something straight out of a sci-fi movie, but it could become a reality. Don’t worry though, it’s likely to be a positive thing.
The Tactile Robotics Team from Bristol Robotics Laboratory (BRL) has pushed the boundaries of soft robotics by developing an open-source tactile fingertip.
The name of the artificial fingertip is TacTip and it is a tactile sensor. This means it can “feel” in a similar way to the human sense of touch. Due to the design’s contribution to soft robotics, it has won Harvard’s International Soft Robotics competition.
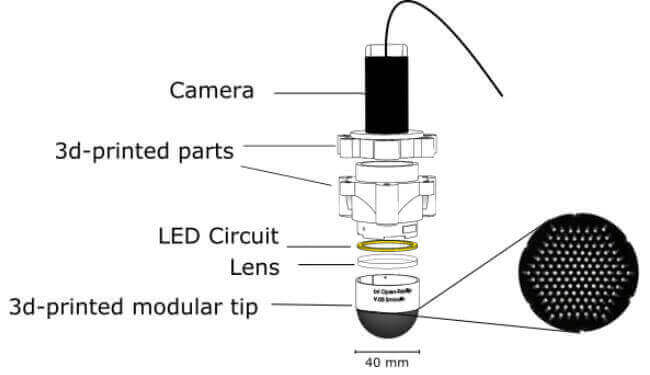
Most noteworthy is the simplistic design of the fingertip. It works using a sensor which has a webcam mounted inside a 3D printed soft fingertip. Therefore, the fingertip is able to track internal pins — these act in a similar way to our own fingers.
As a result of using a 3D printer, the design is also highly customizable, cheap to create, and robust.
Leader of the Tactile Robotics Team and Senior Lecturer in Robotics at the University of Bristol and BRL, Dr Nathan Lepora, said:
“An artificial sense of touch is the key for enabling future robots to have human-like dexterity. Applications of artificial touch span from the future robotization of manufacturing, food production and healthcare, to prosthetic hands that restore a sense of touch.”
Watch the video below from the Tactile Robotics Group BRL to see the finger in action:
https://www.youtube.com/watch?v=XjmeFUNsGZs
Benefits of TacTip, an Artificial Fingertip for Soft Robotics
The 2016 Soft Robotics competition is in its second year. It has the aim of showcasing research related to soft robotics and developing robots.
As a result, Open TacTip was developed at BRL and entered into the competition. However, the work was a collaboration between the University of Bristol and the University of the West of England too. In order to bring the project to fruition, a team of researchers in Tactile Robotics all worked together.
On behalf of the Tactile Robotics Team, the open TacTip entry to the competition was by Nick Pestell, Benjamin Ward-Cherrier and Maria-Elena Giannaccini.
The competition is divided into three categories. Firstly, there is one aimed at high school children who are encouraged to design soft robots. The second category is similar but aimed at college students and robot enthusiasts.
The third category, meanwhile, is rather different. To win this category, a team must offer a contribution to fundamental research in soft robotics. You can find all of the winners here.
Ward-Cherrier, a PhD student at BRL, explained the importance of the feeling fingertip contribution, saying: “TacTip is a cheap artificial fingertip that anyone can build and customise with a 3D printer, opening up the field of tactile robotics to many more researchers.”
Source: University of Bristol
License: The text of "TacTip Wins Harvard International Soft Robotics Competition" by All3DP is licensed under a Creative Commons Attribution 4.0 International License.